Understanding the capabilities and limitations of the robot in summarizing your site's environment.
What types of sensing does the robot have?
Temperature
- The Cobalt robot uses an NTC temperature probe that is accurate to within 2°F
- The temperature reported by the robot is initially calibrated against a thermometer. This provides an offset that is used to compensate for the heat given off by the robot during normal operation.
- The temperature sensor is located near the base of the robot to mitigate the effects of the robot's heat generation. This may cause temperature readings in areas with a cold draft near the floor to be slightly cooler.
Humidity
- The Cobalt robot uses an SCD30 sensor that is accurate to within 3% relative humidity
- Values from this sensor are reported as-is, there is no calibration or offset involved.
Air Quality
- The Cobalt robot uses a dust sensor (GP2Y1014AU0F) that is accurate to within +/-15% and measures total dust PM5 in µg/m^3
- AQI is typically calculated from either PM2.5 or PM10 measurements. Because the robot's sensor is in PM5, there may be discrepancies with other types of commercial sensors, but the value does still reflect relative air quality.
WiFi Signal Strength
- While recording WiFi signal strength, the robot will continuously reassociate its connection, to ensure the strongest access point is being used.
- WiFi strength is measured in RSSI.
How is data recorded and reported?
As the robot patrols, it continuously records measurements from the sensors listed above and associates them with a location based on its current understanding of where it is within the site. The lifetime of this data is typically about a week, at which point it is then removed to make space for newer data. When we consolidate this information, the recorded measurements are plotted onto the site map created by the robot. An example of one of these maps is shown below.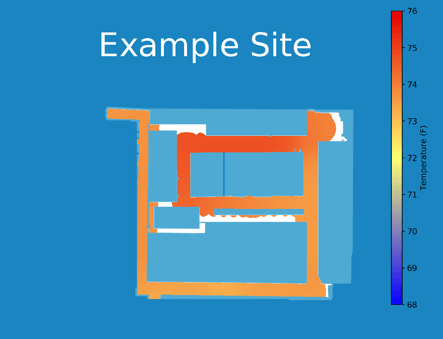
What are the limitations?
The value of the environmental sensors on the robot is in their ability to detect differences between areas of a site, or changes over short time periods. These sensors are not intended to provide absolute measurements, but rather relative measurements that can be useful in comparing different areas or detecting anomalies.
Depending on the environment the robot is patrolling, some of the sensors may need to be recalibrated, serviced, or in rare cases replaced. If we find this is necessary, we will arrange for a Cobalt technician to visit the robot onsite and perform the necessary tasks.
As mentioned above, data is typically only available for about a week. Data can also only be recorded in areas the robot has regular access to. If the robot isn't able to get to an area of the site, it won't have any associated data there, and will simply leave it blank on the map. This also relies on the robot to have a good sense of where it is in the site, if the robot temporarily gets lost, there could be some slight differences in the map that is reported.
How can I receive environmental data?
The most common way to receive environmental data is through our regular email reports. If you would like to have maps of certain environmental data included in your reports, reach out to support@cobaltrobotics.com and let us know!
In most circumstances we can also build a map on the fly if you have a one-time request. Once a member of our support team has received the request, we should be able to provide the map within an hour or two of the robot's next patrol. The robot doesn't record every type of environmental data all the time, so we may need to run it on a patrol to collect data for one-time requests.
Maps are sent as PNG image files.